
| Principe |
|
L'obtention d'une image ťchographique 3D rťsulte de la succession de trois phases :
Ces trois phases seront dťtaillťes aprŤs un rappel sur le principe gťnťral de l'imagerie ultrasonore (puisque l'ťchographie 3D est une image ultrasonore).
1 - Rappel sur l'imagerie ultrasonore
L'imagerie ultrasonore est une technique d'imagerie mťdicale qui s'est dťveloppťe durant la premiŤre moitiť du 20Ťme siŤcle. Elle est de nos jours totalement maÓtrisťe et trŤs utilisťe, notamment en obstťtrique. Cette technique utilise les ondes sonores, de frťquences comprises entre 1 et 10 MHz, et leurs ťchos. Cette technique ressemble beaucoup ŗ l'ťcholocalisation utilisťe par les chauves-souris, les baleines et les dauphins ou encore le sonar des sous-marins. Cette technique se dťcompose comme suit.
Tout d'abord la station d'examens ultrasonores transmet des impulsions sonores de haute frťquence (de 1 ŗ 10 MHz) ŗ l'intťrieur du corps du patient ŗ l'aide d'une sonde. Ces impulsions sonores sont produites par un ťlťment piťzoťlectrique qui se contracte puis vibre ŗ sa frťquence de rťsonance car il est excitť par un courant ťlectrique. Puis les ondes sonores voyagent dans le corps du patient et finissent par rencontrer une frontiŤre entre des tissus (par exemple, entre les tissus mous et les os ou alors entre les tissus mous et du fluide). Certaines de ces ondes sonores sont rťflťchies en direction de la sonde, alors que d'autres voyagent plus loin jusqu'ŗ ce qu'elles rencontrent une autre frontiŤre et se rťflťchissent ŗ leur tour en direction de la sonde. Puis les ondes rťflťchies sont dťtectťes par la sonde (de la mÍme faÁon qu'elles ont ťtť ťmises) puis transmises au calculateur de la station de travail pour Ítre traitťes. Ainsi on peut calculer la distance entre la sonde et le tissu ou l'organe (frontiŤre) en utilisant la vitesse du son dans l'eau (1500 m/s) et le temps entre l'ťmission d'une impulsion et de la rťception de son ťcho (de l'ordre du millioniŤme de seconde en gťnťral). Enfin sur l'ťcran, on peut voir les distances et les intensitťs des ťchos formant une image bidimensionnelle comme l'image ci-dessous.
|
| Figure 1 - Echographie 2D |
Pour des ťchographies typiques, des millions d'impulsions et d'ťchos sont envoyťs et reÁus chaque seconde. La sonde peut Ítre dťplacťe le long de la surface du corps et orientťe pour obtenir des vues diverses. Il existe ťvidemment des interactions destructrices (absorption et dispersion) entre les ondes sonores et les milieux qu'elles traversent. On peut y remťdier en partie en dimensionnant correctement tous les composants de la console d'examen et en appliquant du gel sur la peau du patient pour empÍcher l'attťnuation dans l'air ŗ la sortie de la sonde.
Note : On peut supposer qu'une onde sonore se propage dans tout le corps ŗ la vitesse du son dans l'eau car le corps humain est composť majoritairement d'eau. De plus lorsqu'on mesure la cťlťritť du son dans les diffťrents types de tissus et organes, on s'aperÁoit effectivement qu'elle est proche de 1500 m/s mis ŗ part pour les poumons et l'os du cr‚ne. Ainsi cette approximation n'est pas trŤs fausse et facilite beaucoup les calculs.
2 - Acquisition du volume d'intťrÍt
AprŤs la sťlection d'une zone d'intťrÍt par l'opťrateur en ťchographie 2D, l'acquisition du volume peut se faire, soit avec des sondes spťcifiques volumiques, soit avec des sondes classiques.
 |
 |
|
Figure 2 - sonde classique |
Figure 3 - sonde volumique |
Les sondes volumiques rťalisent automatiquement un balayage de la zone d'intťrÍt, gr‚ce au dťplacement mťcanique du cristal. Le temps de balayage varie de 3 ŗ 10 secondes en fonction de la taille de la zone d'intťrÍt explorťe, et du nombre de plans de coupes dťsirť. Ce balayage peut Ítre linťaire, angulaire, ou rotatif en fonction des sondes.
 |
 |
 |
|
Figure 4 - linťaire |
Figure 5 - angulaire |
Figure 6 - rotatif |
Avec des sondes classiques, le balayage se fait manuellement, ŗ partir d'un ťchographe standard. La succession des plans de coupes ainsi obtenue, est enregistrťe dans une unitť informatique, attenante ŗ l'ťchographe. La qualitť de cette acquisition implique un balayage rťgulier et suffisamment lent de la zone d'intťrÍt, nťcessitant une formation des opťrateurs plus longue et plus fastidieuse qu'avec les sondes volumiques automatisťes. Le balayage par une sonde classique peut Ítre couplť ŗ l'utilisation de capteurs fixťs sur la sonde (capteurs ŗ ultrasons, ŗ infrarouges, ŗ champ ťlectromagnťtique) permettant une reconnaissance exacte du positionnement spatial et de l'orientation de la sonde.
La succession des plans de coupes ainsi acquis (que ce soit par les sondes classiques ou par les sondes volumiques) est chargťe dans la mťmoire de la station de travail pour Ítre exploitťe.
3 - Constitution de la matrice volumique
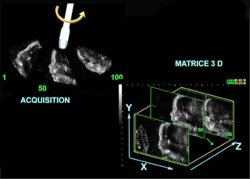
L'objectif de la constitution d'une matrice volumique 3D est de transformer une succession de plans de coupes en une matrice cohťrente et calibrťe [4].
Schťmatiquement, celle-ci se prťsente sous la forme d'un parallťlťpipŤde dont l'image d'acquisition ťlťmentaire constitue les axes X et Y, et dont l'empilement des images d'acquisition constitue l'axe Z.
 |
|
Figure 7 - Acquisition |
Le calibrage de l'axe Z est rťalisť automatiquement en cas d'acquisition par une sonde volumique motorisťe, ou par une sonde couplťe ŗ un capteur.
Elle doit Ítre rťalisťe manuellement lorsque l'acquisition s'est faite ŗ main levťe. Le systŤme crťe alors une matrice volumique cohťrente, soit par interpolation de plans de coupes supplťmentaires, soit en supprimant certains plans de coupes initiaux, permettant le calibrage de l'axe des Z par rapport ŗ celui des axes X, Y.
Cette matrice volumique est alors stockťe en mťmoire afin d'y Ítre exploitťe.
4 - Exploitation du volume
On peut exploiter de diffťrentes maniŤres cette matrice volumique en fonction de ce qu'on veut faire avec. Ici je parlerai de quatre types d'exploitation diffťrents.
L'analyse multi-plans : (figure 8) il s'agit probablement du mode d'exploration le plus intťressant autorisť par l'ťchographie 3D. Il permet en effet d'obtenir des plans de coupes arbitrairement dťfinis par l'utilisateur. En effet, puisque l'utilisateur dispose d'une matrice volumique dťfinie en chaque voxel, il peut visualiser tous les plans de coupe de cette matrice volumique qu'il dťsire. En pratique, ce mode de visualisation est constituť de trois plans orthogonaux qui peuvent Ítre dťplacťs par l'utilisateur. A l'ťcran s'affichent les coupes de ces trois plans avec la matrice volumique, ainsi qu'une schťmatisation symbolique de ces plans de coupe permettant ŗ l'utilisateur de se repťrer dans le volume de la matrice. Ce mode de visualisation permet ŗ l'utilisateur d'obtenir des plans de coupes impossibles ŗ obtenir lors d'une ťchographie 2D. Par exemple, il peut visualiser des plans de coupe perpendiculaires ŗ l'axe du faisceau ultrasonore.
Le rendu surfacique : (figure 9) ce mode d'exploitation ťtait le symbole de l'ťchographie 3D ŗ ses dťbuts. Il consiste ŗ sťlectionner et visualiser une surface entourťe de structures liquides. On extrait l'organe d'intťrÍt de son environnement en sťlectionnant un paramŤtre de seuil. Puis ŗ l'aide d'algorithmes informatiques, on habille la surface de cette zone d'intťrÍt par un modŤle d'ťclairage et d'ombrage. Ainsi l'utilisateur obtient une " reprťsentation 3D " de la zone qui l'intťresse. Ainsi il peut facilement apprťcier la face ou les extrťmitťs d'un fútus.
Le rendu par transparence : (figure 10) la matrice volumique peut Ítre vue en transparence, c'est le mode rayon X oý toutes les informations contenues dans le bloc sont rťunies en un mÍme plan comme sur un clichť radiologique. En fonction de l'intensitť de chaque voxel, on peut attribuer des propriťtťs de transparence aux diffťrents ťlťments de la matrice 3D. Ceci permet d'extraire soit les ťchos les plus denses, permettant ainsi une visualisation des structures osseuses, soit ŗ l'inverse, les zones anťchogŤnes pour la reconstruction des organes remplis de liquide. C'est le mode qui me semble le moins intťressant puisqu'on obtient des images de moins bonnes qualitťs que celles obtenues par rayons X.
Le rendu en mode couleur : (figure 11) on peut utiliser les informations doppler obtenues lors du balayage et qui sont inclues dans le volume. Ainsi l'utilisateur peut reconstruire les arbres vasculaires du patient qui sont caractťrisťs par des valeurs d'intensitť ou par leur vťlocitť.
| Index | << Partie prťcťdente | Partie suivante >>
| Index | Introduction | Principe | Applications mťdicales et informations recueillies |
| Avantages, inconvťnients et contraintes | Consťquences pour le traitement d'images |
| Conclusion | Rťfťrences |